TMC4361A-LA闭环控制内置算法S斜坡6点坡道加减速静音控制IC
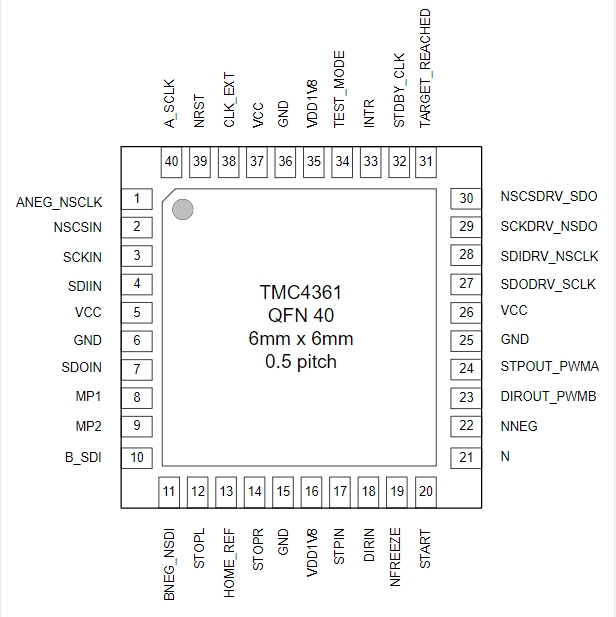
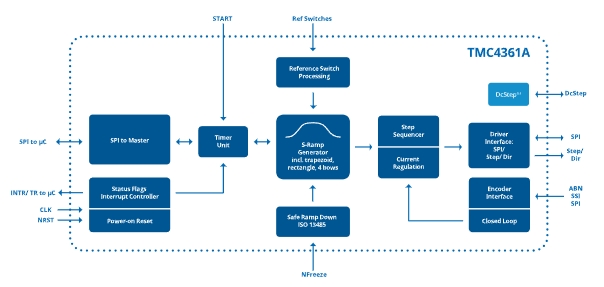
TMC4361是一颗闭环算法芯片,内置S型加减速曲线和SixPoint加减速曲线,运动更平滑,针对步进电机进行了高速优化,支持动态修改运动参数。TMC4361A提供SPI和Step/Dir接口,以及用于闭环操作的编码器接口。
控制输入支持:SPI
控制输出支持:脉冲方向,SPI
编码器输入支持:增量型,绝对值
控制输入支持:SPI
控制输出支持:脉冲方向,SPI
编码器输入支持:增量型,绝对值